100 Meter LiDAR Range Sensor
Found this unit on Aliexpress, for around $32 dollars, it was probably used as an electronic tape measure. The thing that peaked my interesting was the 100 meter range (328 feet or so). It is easy to use, and seems to work well, but so far I've not gotten anywhere close to the 328 feet. (32.8 feet is about the best I've seen so far)
Could this be a miss print on the listing, or could I just be using this wrong (?) ......
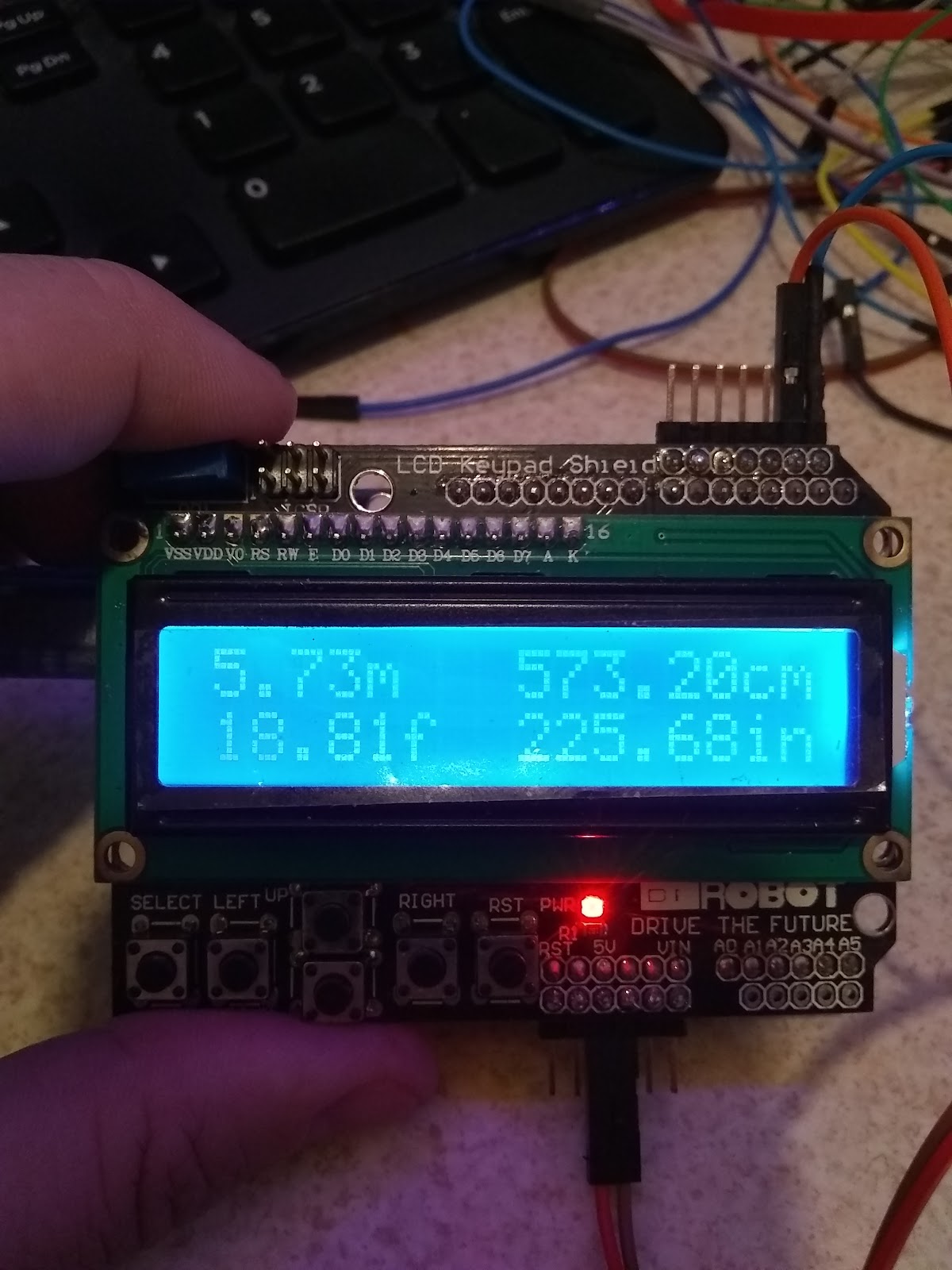
Well either way, I've set this up to work with an Arduino Uno - so far I'm just displaying the distance on a DF Robot 1602 LCD/w buttons.


Lidar from Aliexpress: https://www.aliexpress.com/item/100M-Laser-ranging-module-digital-sensors-Distance-Measuring-serial-port-USB-to-RS232-TTL-signal/32702749857.html?spm=a2g0s.9042311.0.0.79de4c4dSlT78Y
Laser Type: 635nm, 1 mw (red)
Range: 0.02 to 100 meters
Typical accuracy: +/- 2mm (0 to 40, indoor 20 meters white walls; through correction can be up to +/- 1.5mm)
The laser can be turned on or off (assuming for aiming reasons), reads can be “automatic”, fast (less accuracy), and slow (more accuracy) - “automatic” appears to be about medium speed.
The laser can also display it’s temperature and voltage levels. The output of the sensor is in the format of a String, a typical reading may look something like this:
“12.345m,0079” which tells the distance, and signal quality. Signal quality a lower number is better. This is good for display, and easy to use for display, but it’s a problem if we need to compare the numbers, or if we are using this on a robot and need the robot to stop at a distance.
Luckily - there is a way to remove the unwanted information from a string, and turn that string into a float - it’s not pretty, and a lot of code to do it, but it can be done.
In my demo, I’ve converted the distance from meters to feet to cm to inches. I’ve dropped the signal quality - but it can be pulled out and used as well.
The demo, will display if the laser is on, or off, the temperature and voltages (default temperature is Celsius, and I convert it to Fahrenheit), formatted for the display I am using.
I’ve setup 5 buttons, one for normal reading, one for fast, one for slow - one will toggle the laser on or off, and one will display voltage, temperature.
An expanded demo would be to use this on a robot for distance/obstacle avoidance.
(under my less than scientific tests, I’ve only been able to get a reading of 32.x feet or about 10 meters - anything greater than 32 feet gives either a reading that is just wrong, or an error. Is it possible that I have a bad unit, or that it really is 10 meters not 100 meters (which would mean it was listed wrong to start with)? )

